
FOLLOW FOCUS - Bežični Follow Focus sustav

Kasne 2023. godine začeta je ideja za bežični Follow Focus sustav namijenjen za korištenje na snimanjima BjeloPIC-a. Neiznenađujuće, odjel za Štedne tehnologije i testiranja je brzo nakon svog osnivanja primio brojne želje od strane snimatelja BjeloPIC-a za izradu vlastitog sustava za Follow Focus jer, u zajedničkim riječima Gospodina Generalnog Petra Klinca i Pročelnika Kamere i Boja te Izvršnog Menadžera Ideja Mate Pušića, "ne planiramo platit petsto eura za motorić i mikroupravljač."
Follow Focus je sustav dizajniran za pomoć pri snimanju. Glavna namjena mu je okretanje focus prstena na objektivu i, u rijetkim slučajevima, zoom. Dijele se uglavnom na motorizirane i ručne. Ručni se ponašaju više kao "shortcut" snimatelju do Focus prstena (snimatelj idalje okreće Focus prsten, no neizravno kroz nekoliko zupčanika), a motorizirani koristi motoriće koji okreću prstene za snimatelja. Korištenje motoriziranih dozvoljava rasterećivanje snimatelja od krivnje mutnog kadra u post-produkciji, jer ta krivnja onda pada na zasebnog Focus Pullera.

Za naš Follow Focus sustav, odlučili smo koristiti komponente koje je lako nabaviti, večinom sa AliExpressa. Kučište i sami način učvršćivanja sustava na tijelo kamere smo odlučili 3D isprintati. Nakon provedbe brojnih prijedloga i žalbi na prijedloge, Odjel ŠTiT odlučio je ostvariti projekt prema sljedećoj blok shemi:
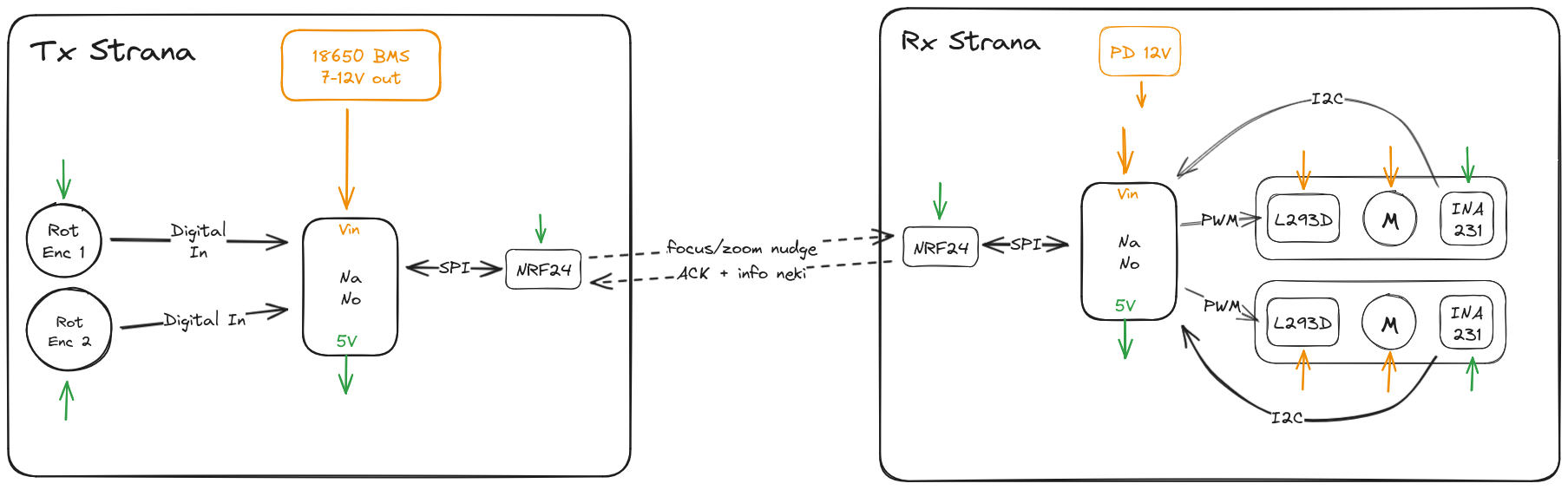
Mozak, ili zapravo hemisfere jer rade zajedno, čine dva Arduina Nano, jedan na strani upravljača (Tx Strana) i jedan na strani samog sustava na kameri (Rx Strana). Odabrali smo Arduino Nano jer je mali, koristi vrlo malo struje (plan je napajati Rx Stranu sa baterije) i jer mu posao fakat nije toliko težak pa nam nije ni trebao jači.
Tx stranu smo odlučili napajati preko dvije izmjenjive 18650 baterije u seriji bez BMSa (~7.4V, Nano podržava ulaz ~7-12V na Vin). Kako ne bi došlo do pretjeranog pražnjenja tih baterija, Arduino će povremeno očitavati napon na jednoj bateriji. Na Tx strani će se također nalaziti dva Rotary Encodera, kojima će Focus Puller upravljati focus i zoom. Posao Arduina na toj strani je očitavati, interpretirati te slati podatke o okretanju Rotary Encodera na Tx stranu i primati povratne informacije od Tx strane (u slučaju da se dogodila greška).
Za komunikaciju između strana sustava odabran je par NRF24L01 modula. Oni operiraju na frekvenciji od 2.4GHz i imaju teoretski domet od više stotina metara.

Rx stranu smo odlučili napajati preko USB C PowerDelivery (PD). Pošto je plan koristiti PD za što više od naše opreme (o tome u drugoj objavi) odlučili smo napajati i sami Follow Focus sustav preko PD. Motorići za koje smo se odlučili rade na 12V i 100RPMa, pa je bilo potrebno naručiti tzv. "PowerDelivery Trigger" pločicu koja traži od punjača u koji je sustav ukopčan 12V (naravno, kako bi to radilo, punjač mora podržavati izlaz od 12V).
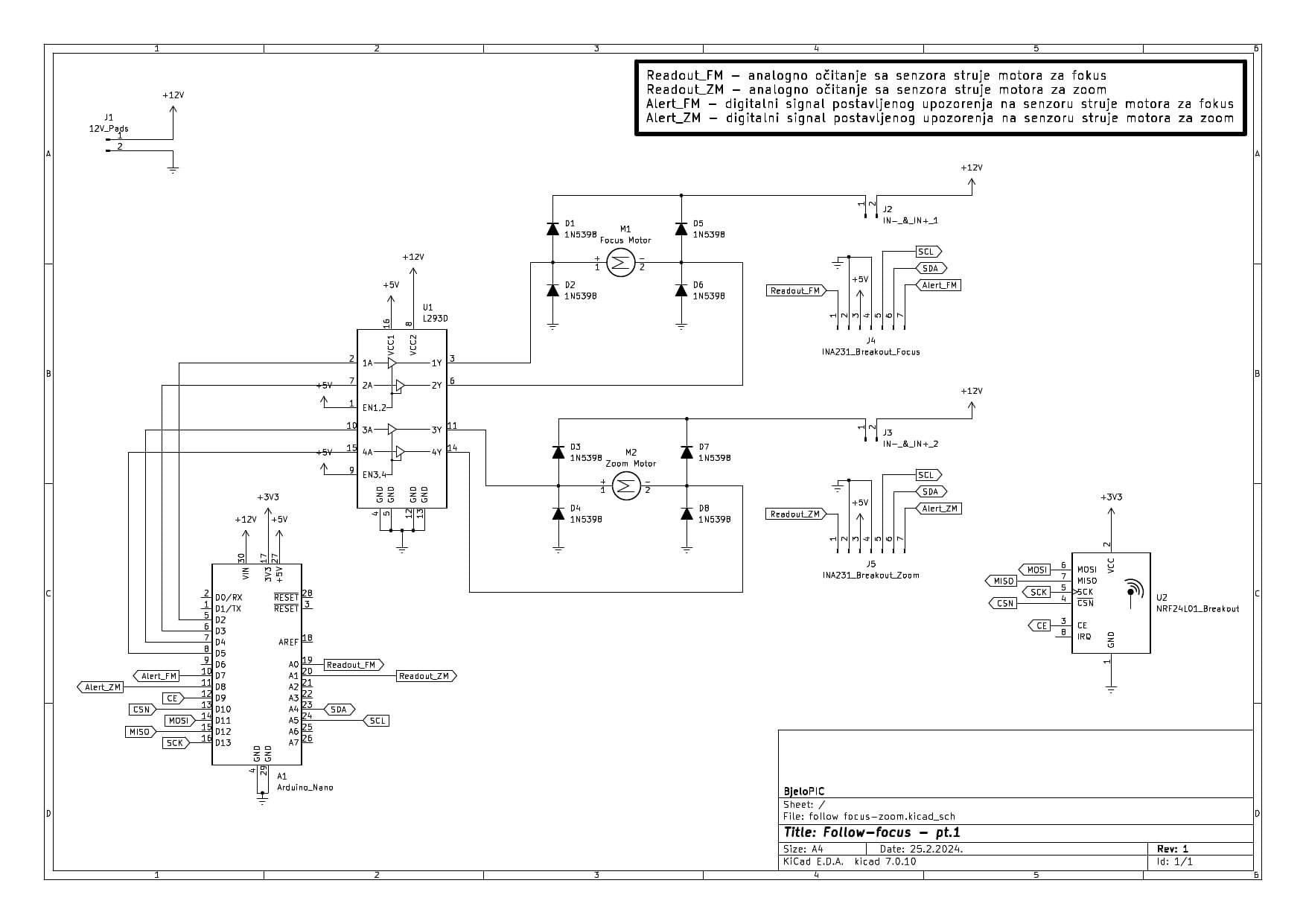
Za upravljanje motorićima odabran je L293D sklop, koji može kontrolirati brzinu i smjer DC motorića, koristeći PWM signal sa Arduina. Kao sigurnosnu mjeri, i za povratne informacije o stanju zoom-a, dodan je i INA231 modul za obostrano mjerenje struje. Oni će mjeriti struju koju troši pojedini motor. Ove podatke ćemo primarno koristit za prepoznavanje kada je objektiv potpuno zumiran ili odzumiran.
Zoom prsten, za razliku od focus prstena, se ne može okretati beskonačno. Kada se objektiv potpuno zumira/odzumira, više se ne može okretati prsten u tu stranu. Ovo bi uzrokovali i blokiranje okreta motorića koji se želi okretati. Motori, u stanju takvog preopterećenja, vuku punu veču struju i mogu se početi pregrijavati. Arduino na Rx strani će, zbog toga, konstantno mjeriti struju na oba motorića kako se ne bi preopteretili.
Za svrhe projekta, stvorena je slijedeća el. shema za Rx stranu:
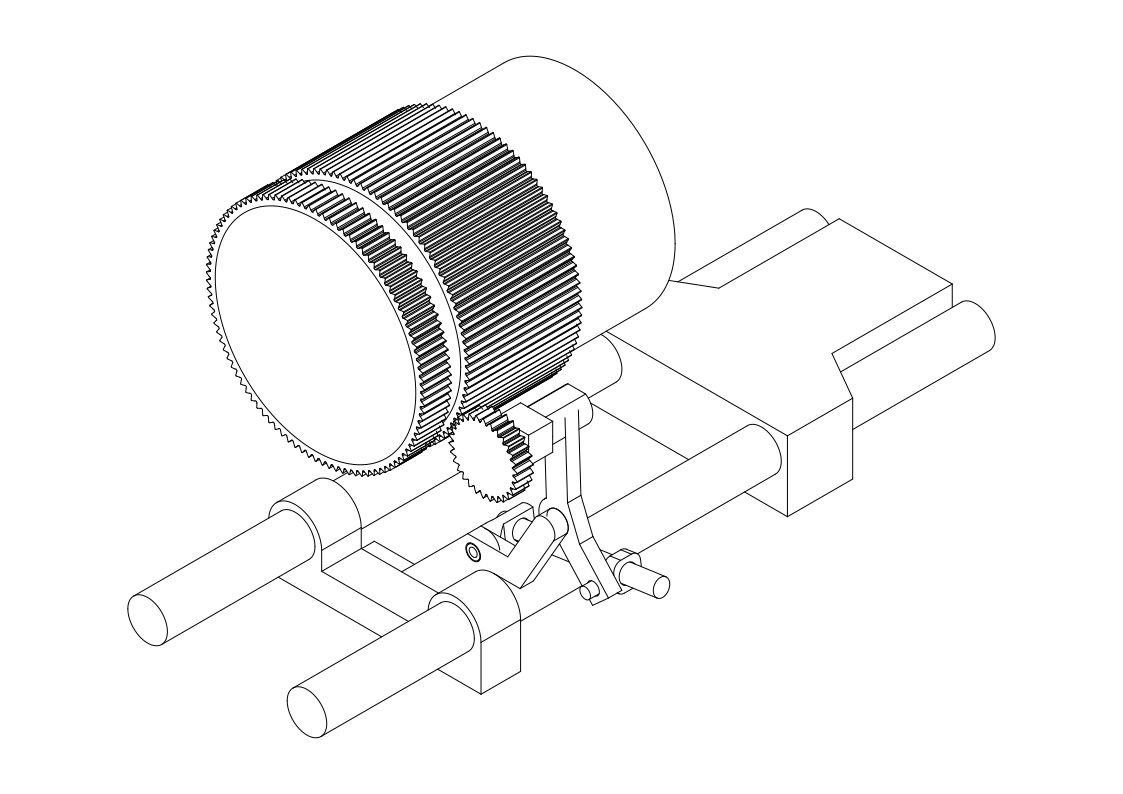
Kučište za Tx stranu i sam način pričvršćivanja na kameru smo rekli 3D modelirat, i u tu svrhu napravljen je sljedeći model u FreeCAD-u:
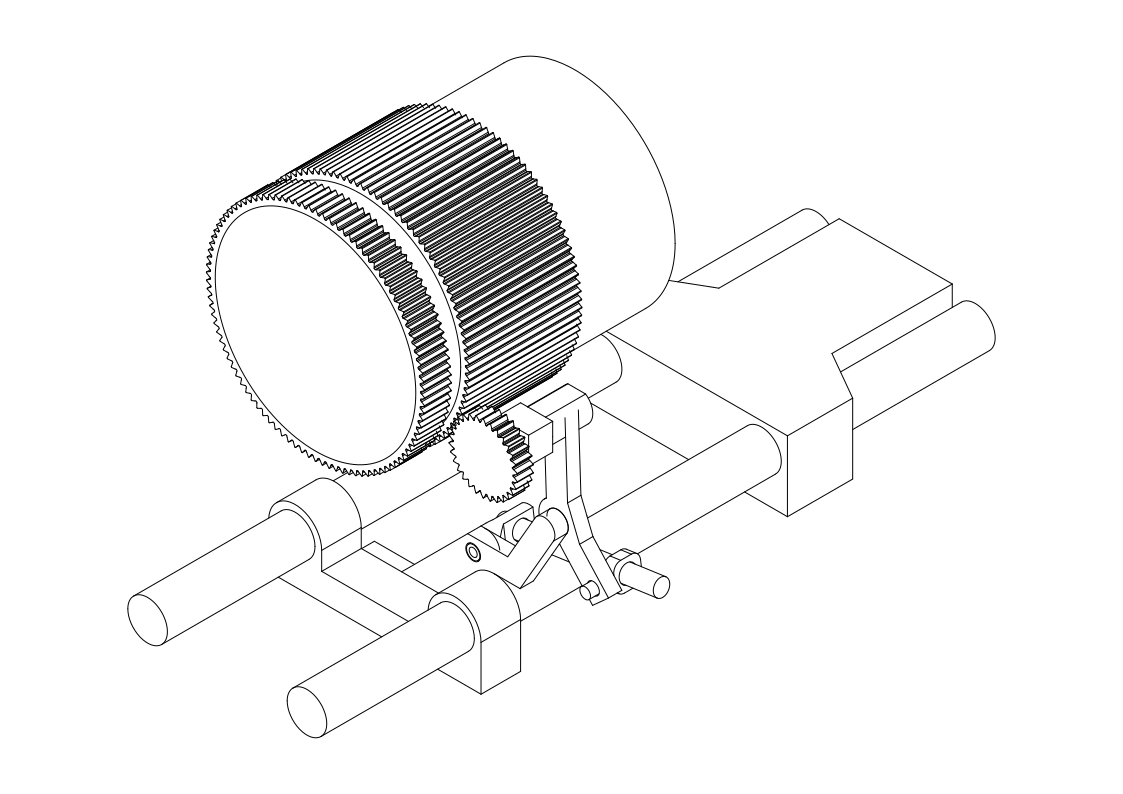
Pošto nitko u odleju Štedne tehnologije i testiranja ne vjeruje previše u trenje, odlučili smo napraviti model koji ne ovisi o trenju/stezanju sustava za šupku kako bi stajao na mjestu. Model iznad koristi M6 šaraf za namještanje udaljenosti motorića od objektiva.
Prototip se još mora isprintati i testirati.